-3
私はそれを読むと、パッケージを追加する必要があります。 私はこの問題を解決することを知りません。 どのように "フェーズドアレイツールボックス"を解決することができます
bb=rotz(hi(i));
での問題は「Rotzの」を使用するには、あなたが必要になる場合があります。 Rotzの - フェーズドアレイSystem Toolboxの
私はそれを読むと、パッケージを追加する必要があります。 私はこの問題を解決することを知りません。 どのように "フェーズドアレイツールボックス"を解決することができます
bb=rotz(hi(i));
での問題は「Rotzの」を使用するには、あなたが必要になる場合があります。 Rotzの - フェーズドアレイSystem Toolboxの
あなたが持っていない場合は、単に機能の独自のバージョンを作ることができます必要なツールボックス。 rotzは、単純に、z軸を中心に回転する回転行列です。角度を度で受け入れ、を返し、3 x 3の行列を返します。
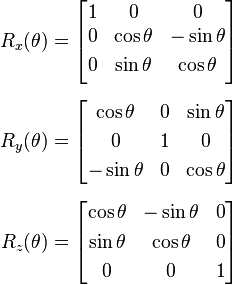
出典:Wikipedia
したがって、あなたがするrotzを定義することができます。
function M = rotz(ang)
M = [cosd(ang) -sind(ang) 0; sind(ang) cosd(ang) 0; 0 0 1];
end
保存x、yとz軸の周りの回転行列であることを思い出してくださいこのコードはrotz.mというファイルにあります。メインコードを実行して使用します。 cosdとsindは、入力として度を入力し、ラジアンではありません(cosとsin)。